Below are selected papers that represent our main research threads. Please visit Publications for the full list.


Contact-rich intelligence
ComFree-Sim: A GPU-Parallelized Analytical Contact Physics Engine for Scalable Contact-Rich Robotics Simulation and Control
arXiv, 2026
Other Selected Papers
- Task-Driven Hybrid Model Reduction for Dexterous Manipulation
Wanxin Jin, Michael Posa. IEEE Transactions on Robotics (T-RO), 2024. - Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Wei-Cheng Huang, Alp Aydinoglu, Wanxin Jin, Michael Posa. IEEE International Conference on Robotics and Automation (ICRA), 2024. - Adaptive Barrier Smoothing for First-Order Policy Gradient with Contact Dynamics
Shenao Zhang, Wanxin Jin, Zhaoran Wang. International Conference on Machine Learning (ICML), 2023.
Learning from humans
Differentiable optimal control and safe learning
A Differential Dynamic Programming Framework for Inverse Reinforcement Learning
IEEE Transactions on Robotics (T-RO), 2025
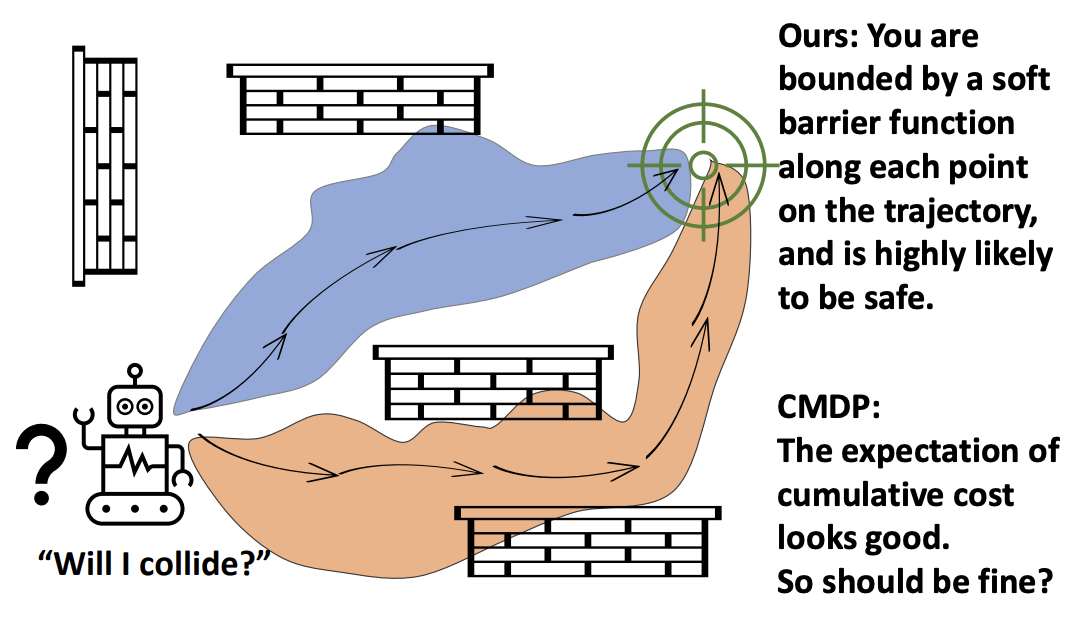
Enforcing Hard Constraints with Soft Barriers: Safe-driven Reinforcement Learning in Unknown Stochastic Environments
International Conference on Machine Learning (ICML), 2023