ComFree Sim#
Overview#
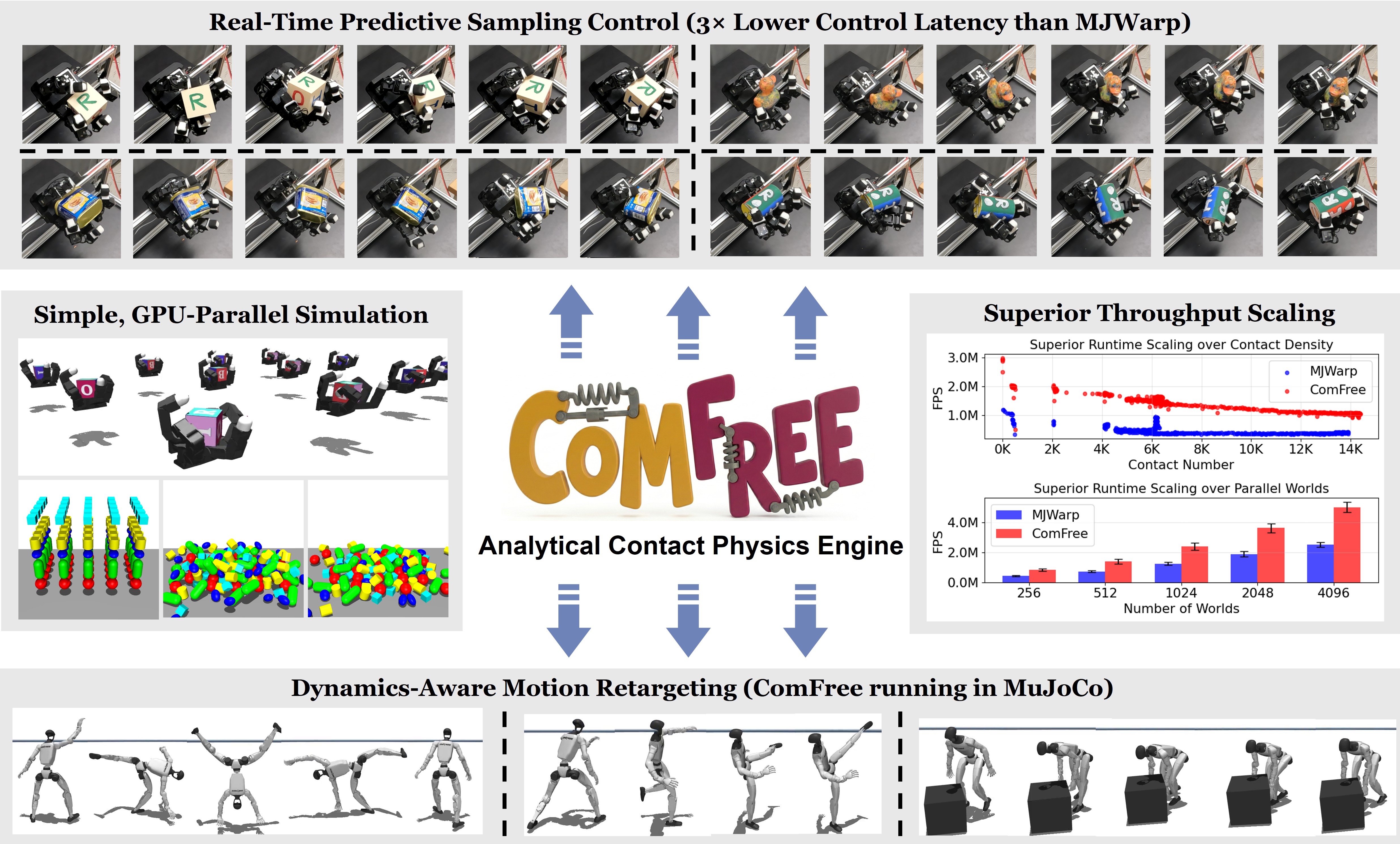
ComFree-Sim is a GPU-parallel analytical contact physics engine for scalable contact-rich robotics simulation and control. It replaces iterative complementarity-based contact resolution with a complementarity-free analytical formulation that computes contact impulses in closed form, enabling near-linear scaling with contact count in dense-contact scenes.
Resources#
Project Website: https://irislab.tech/comfree-sim/
Documentation: https://irislab.tech/comfree-doc/intro.html
Paper (arXiv): https://arxiv.org/abs/2603.12185
Why ComFree Warp#
Built in Warp and exposed through a MuJoCo-compatible interface, comfree_warp can be used as a drop-in backend alternative to MuJoCo Warp (MJWarp). It inherits most of the features provided by MJWarp, while replacing the contact dynamics resolution stage with a complementarity-free contact formulation. This flattened contact-resolution pipeline delivers more than 2x higher throughput than MJWarp while maintaining comparable and tunable physical fidelity.
Tradeoffs and Recommendation#
While comfree_warp excels in speed, it may also be more prone to instability and require more manual tuning than the more mature and well-maintained MuJoCo stack. Because comfree_warp replaces the original contact solver with the ComFree formulation, some contact-dynamics behavior differences relative to MuJoCo are expected. In general, we find ComFree tends to produce more dynamic contact behavior than MuJoCo. If simulation speed is not a primary concern, we recommend continuing to use MuJoCo (Warp).
At the same time, ComFree is an evolving open project, and we warmly welcome contributions from the community to improve robustness, expand features, and broaden application support.
Potential Applications#
This makes comfree_warp well suited for workloads where both speed and customizable contact matter, including:
scalable contact-dense simulation
low-latency (simulation) predictive control for contact-rich robotics
differnetiable contact dynamics learning (real-to-sim)
real-time predictive control for dexterous manipulation (graident-based, coming soon)
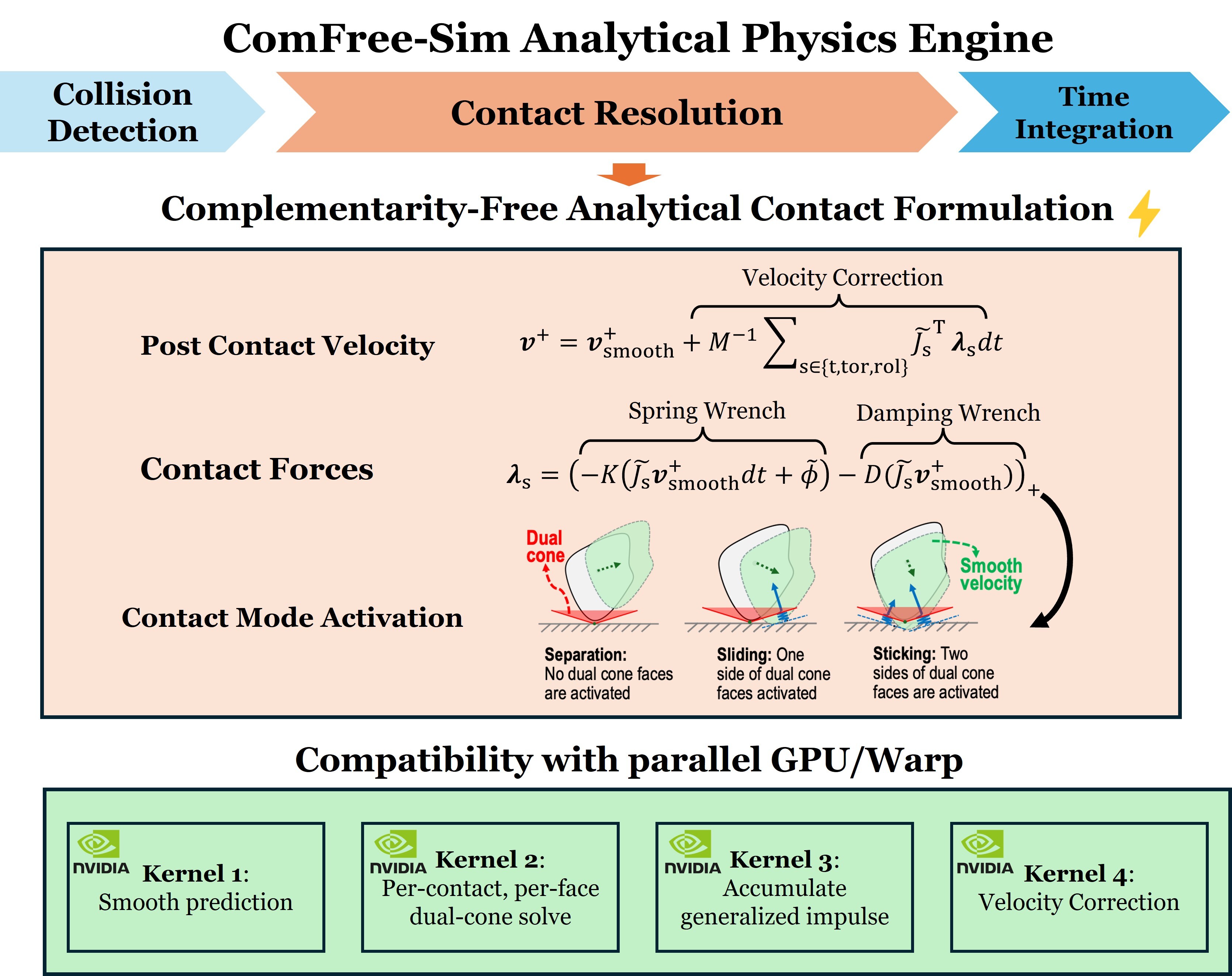
Simulation Pipeline#
The flowchart below summarizes the main computation path and highlights how the analytical contact model fits into the overall simulation pipeline.
Acknowledgments#
We acknowledge the MuJoCo team and the Newton team for open-sourcing the MuJoCo simulator and the Warp language. Their tools and engineering work made the development of comfree_warp possible.
Documentation Guide#
Getting Started
Using ComFree Warp
Concepts and Comparison
Deployment and Limitations