Below are some representative publications in each research interest. Please visit Publications page for a full list.
Contact-rich manipulation

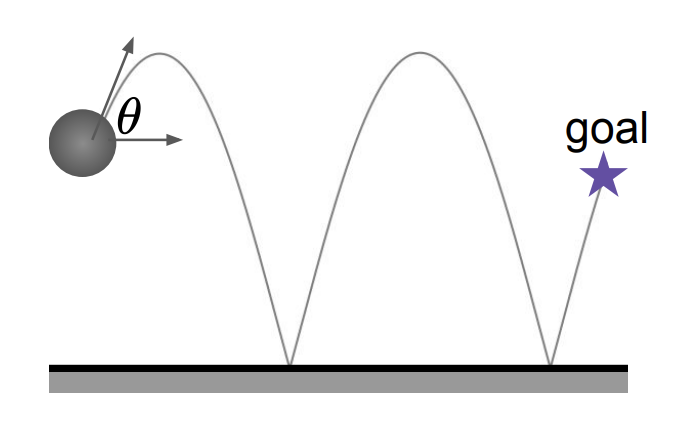
Adaptive Barrier Smoothing for First-Order Policy Gradient with Contact Dynamics
International Conference on Machine Learning (ICML), 2023
Autonomy alignment
Fundamental methods in robotics
- Optimal control, motion plannig, reinforcement learning
- Differentiable optimization, inverse optimization
- Hybrid system learning and control
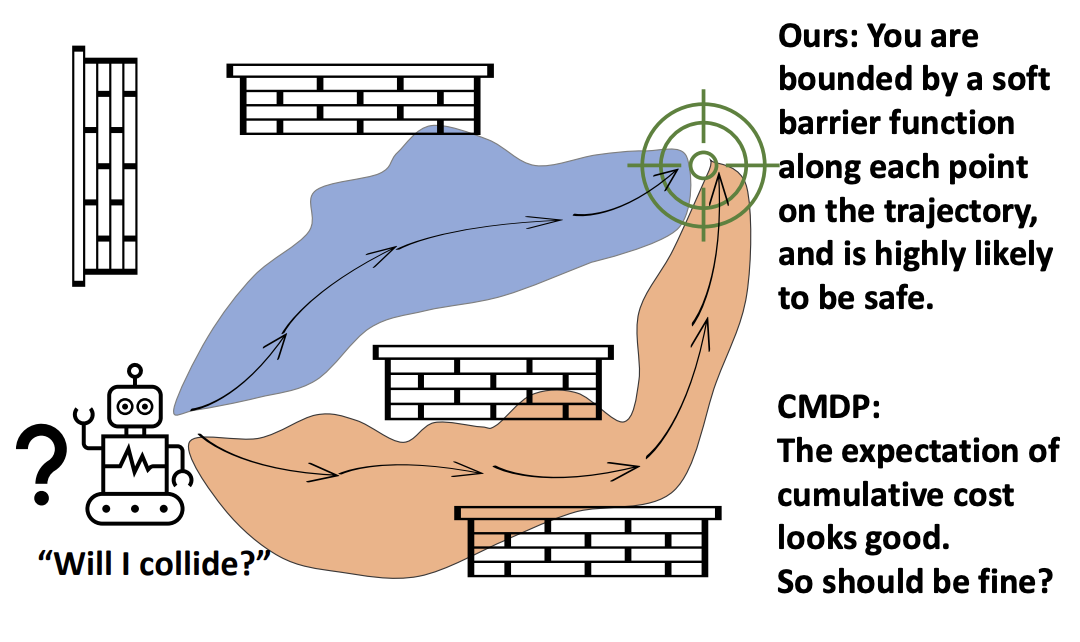
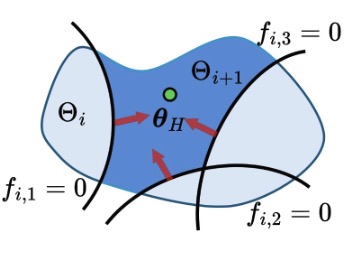
Enforcing Hard Constraints with Soft Barriers: Safe-driven Reinforcement Learning in Unknown Stochastic Environments
International Conference on Machine Learning (ICML), 2023

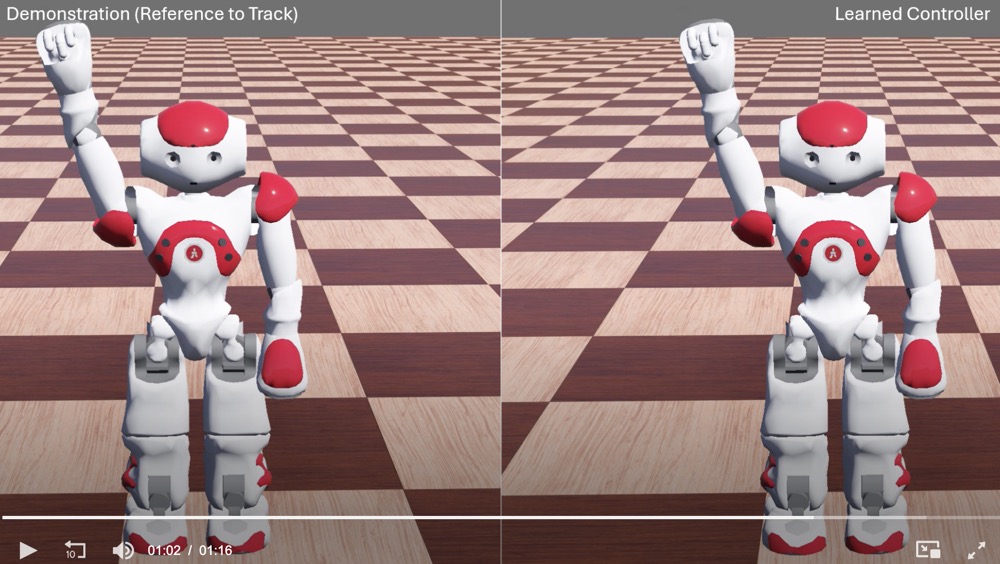
A Differential Dynamic Programming Framework for Inverse Reinforcement Learning
IEEE Transactions on Robotics (T-RO), 2025