ContactGaussian-WM: Learning Physics-Grounded World Model from Videos
Meizhong Wang, Wanxin Jin, Kun Cao, Lihua Xie, Yiguang Hong
arXiv preprint, 2026
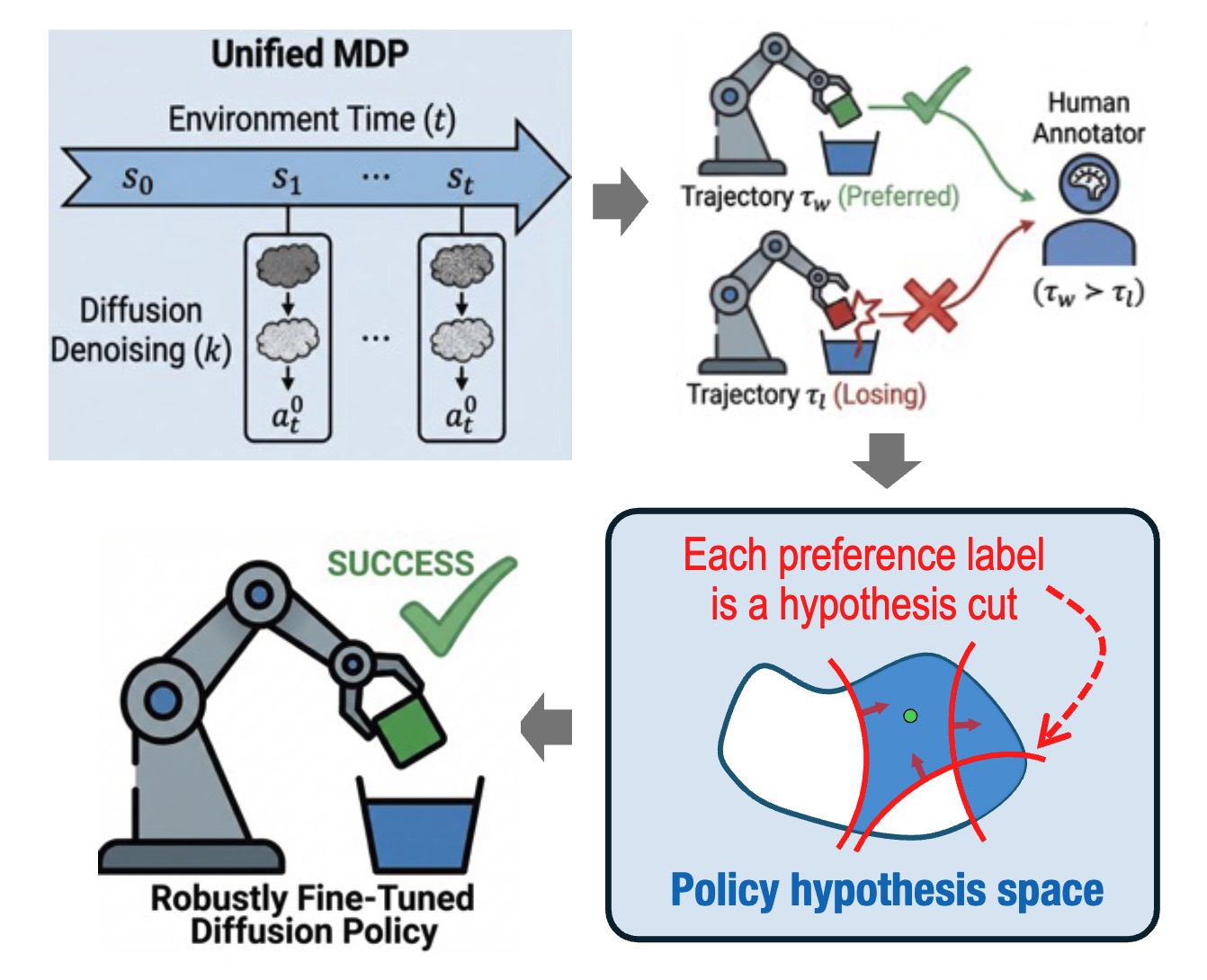
RoDiF: Robust Direct Fine-Tuning of Diffusion Policies with Corrupted Human Feedback
Amitesh Vatsa, Zhixian Xie, Wanxin Jin
arXiv preprint, 2026
Where to Touch, How to Contact: Hierarchical RL-MPC Framework for Geometry-Aware Long-Horizon Dexterous Manipulation
Zhixian Xie, Yu Xiang, Michael Posa, Wanxin Jin
arXiv preprint, 2026
TwinTrack: Bridging Vision and Contact Physics for Real-Time Tracking of Unknown Objects in Contact-Rich Scenes
Wen Yang, Zhixian Xie, Yiting Wang, Abhijit Tadepalli, Heni Ben Amor, Shan Lin, Wanxin Jin
IEEE International Conference on Robotics & Automation (ICRA), 2026
Safe MPC Alignment with Human Directional Feedback
Zhixian Xie, Wenlong Zhang, Yi Ren, Zhaoran Wang, George. J. Pappas and Wanxin Jin
IEEE Transactions on Robotics (T-RO), 2026
ZORMS-LfD: Learning From Demonstrations With Zeroth-Order Random Matrix Search
Olivia Dry, Timothy L. Molloy, Wanxin Jin, Iman Shames
IEEE Robotics and Automation Letters (RA-L), 2025

A Differential Dynamic Programming Framework for Inverse Reinforcement Learning
Kun Cao, Xinhang Xu, Wanxin Jin, Karl H. Johansson, and Lihua Xie
IEEE Transactions on Robotics (T-RO), 2025
-xman.gif)
Whole-Body Impedance Coordinative Control of Wheel-Legged Robot on Uncertain Terrain
Lei Shi, Xinghua Yu, Cheng Zhou, Wanxin Jin, Wanchao Chi, Shenghao Zhang, Dongsheng Zhang, Xiong Li, Zhengyou Zhang
IEEE Robotics and Automation Letters (RA-L), 2025
On-Palm Dexterity: Dynamic Reorientation of Objects via Emergent Flipping and Sliding
Zhixian Xie, Wen Yang, Wanxin Jin
ICRA 2025 Workshop on Learning Meets Model-Based Methods for Contact-Rich Manipulation

Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
Wanxin Jin
Robotics: Science and Systems (RSS), 2025
Robust Reward Alignment via Hypothesis Space Batch Cutting
Zhixian Xie, Haode Zhang, Yizhe Feng, Wanxin Jin
International Conference on Machine Learning (ICML), 2025
ContactSDF: Signed Distance Functions as Multi-Contact Models for Dexterous Manipulation
Wen Yang and Wanxin Jin
IEEE Robotics and Automation Letters (RA-L), 2025
Language-Model-Assisted Bi-Level Programming for Reward Learning from Internet Videos
Harsh Mahesheka, Zhixian Xie, Zhaoran Wang, Wanxin Jin
arXiv preprint, 2024
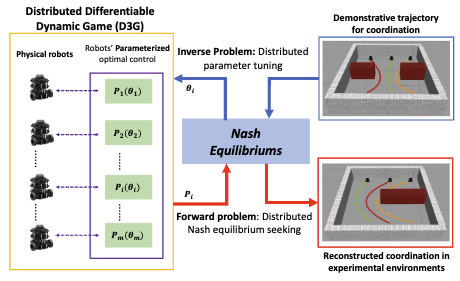
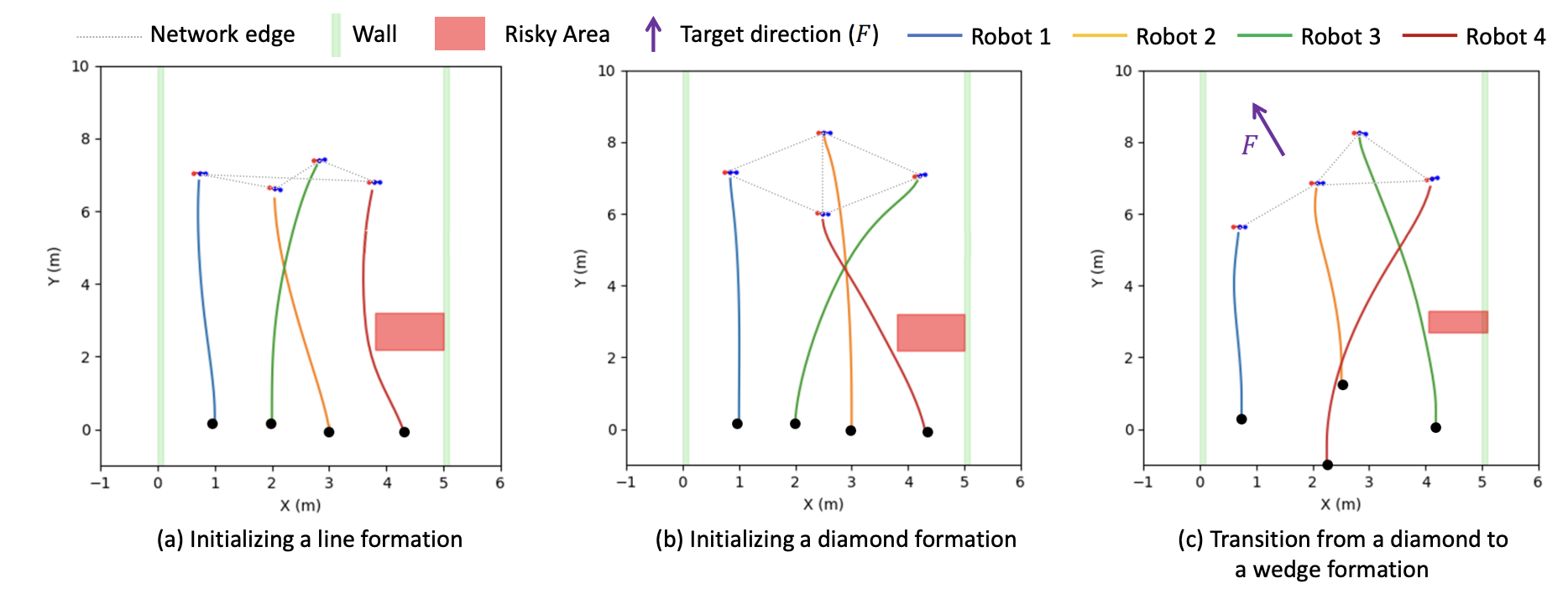
D3G: Learning Multi-robot Coordination from Demonstrations
Yizhi Zhou, Wanxin Jin, Xuan Wang
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024
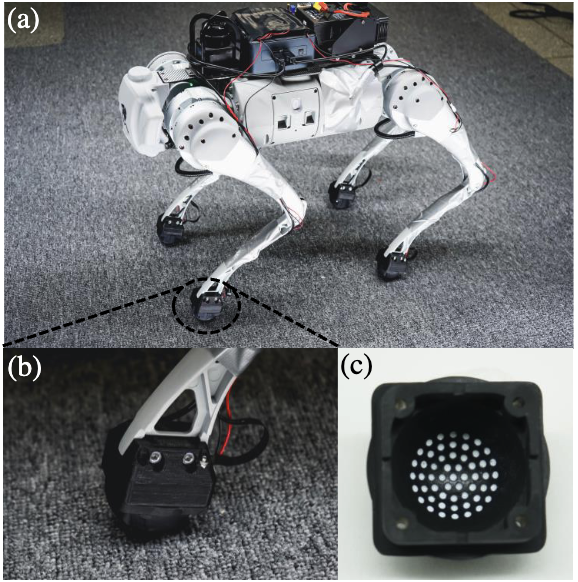
TacTID: High-performance Visuo-Tactile Sensor-based Terrain Identification for Legged Robots
Ziwu Song, Chenchang Li, Zhentan Quan, Shilong Mu, Xiaosa Li, Ziyi Zhao, Wanxin Jin, Chenye Wu, Wenbo Ding, Xiao-Ping Zhang
IEEE Sensors Journal, 2024
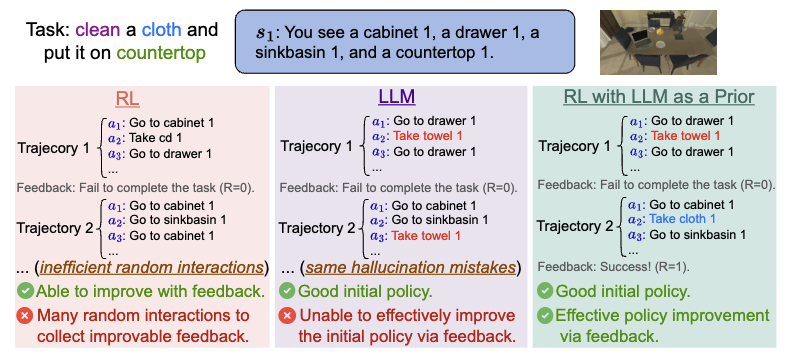
How Can LLM Guide RL? A Value-Based Approach
Shenao Zhang, Sirui Zheng, Shuqi Ke, Zhihan Liu, Wanxin Jin, Jianbo Yuan, Yingxiang Yang, Hongxia Yang, Zhaoran Wang
arXiv preprint, 2024
Task-Driven Hybrid Model Reduction for Dexterous Manipulation
Wanxin Jin and Michael Posa
IEEE Transactions on Robotics (T-RO), 2024
Adaptive Contact-Implicit Model Predictive Control with Online Residual Learning
Wei-Cheng Huang, Alp Aydinoglu, Wanxin Jin, Michael Posa
IEEE International Conference on Robotics and Automation (ICRA), 2024

Guaranteed Stabilization and Safety of Nonlinear Systems via Sliding Mode Control
Fan Ding, Jin Ke, Wanxin Jin, Jianping He, and Xiaoming Duan
IEEE Control Systems Letters, 2023
Adaptive Barrier Smoothing for First-Order Policy Gradient with Contact Dynamics
Shenao Zhang, Wanxin Jin, Zhaoran Wang
International Conference on Machine Learning (ICML), 2023
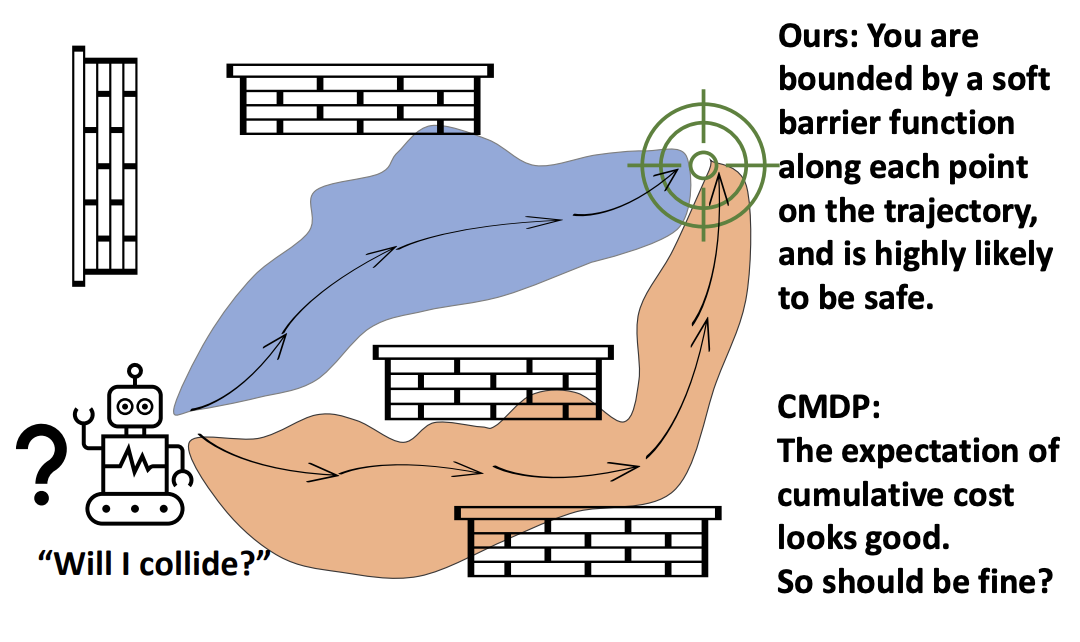
Enforcing Hard Constraints with Soft Barriers: Safe-driven Reinforcement Learning in Unknown Stochastic Environments
Yixuan Wang, Simon Sinong Zhan, Ruochen Jiao, Zhilu Wang, Wanxin Jin, Zhuoran Yang, Zhaoran Wang, Chao Huang, Qi Zhu
International Conference on Machine Learning (ICML), 2023
Robust Safe Learning and Control in Unknown Environments: An Uncertainty-Aware Control Barrier Function Approach
Jiacheng Li, Qingchen Liu, Wanxin Jin, Jiahu Qin, and Sandra Hirche
IEEE Robotics and Automation Letters (RA-L), 2023
D3G: Learning Multi-robot Coordination from Demonstrations
Xuan Wang, YiZhi Zhou, and Wanxin Jin
IEEE International Conference on Intelligent Robots and Systems (IROS), 2023.
Identifying Reaction-Aware Driving Styles of Stochastic Model Predictive Controlled Vehicles by Inverse Reinforcement Learning
Ni Dang, Tao Shi, Zengjie Zhang, Wanxin Jin, Marion Leibold, and Martin Buss
International Conference on Intelligent Transportation Systems (ITSC), 2023.
Learning from Human Directional Corrections
Wanxin Jin, Todd D Murphey, Zehui Lu, and Shaoshuai Mou
IEEE Transactions on Robotics (T-RO), 2023
Learning from Sparse Demonstrations
Wanxin Jin, Todd D Murphey, Dana Kulic, Neta Ezer, and Shaoshuai Mou
IEEE Transactions on Robotics (T-RO), 2023
Learning Linear Complementarity Systems
Wanxin Jin, Alp Aydinoglu, Mathew Halm, and Michael Posa
Learning for Dynamics and Control (L4DC), 2022
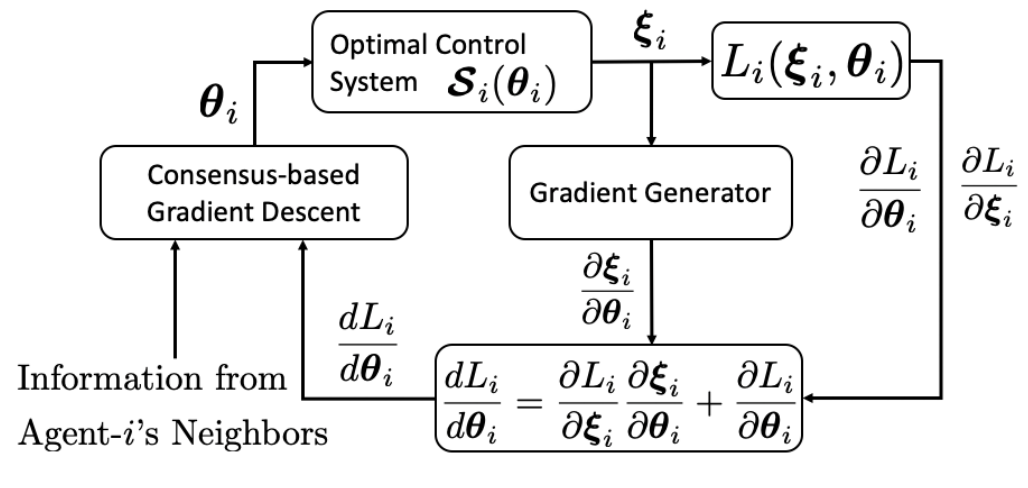
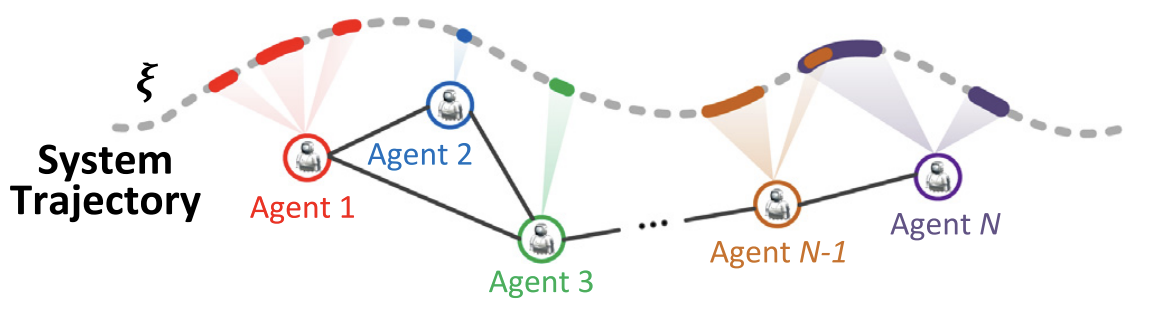
Cooperative Tuning of Multi-Agent Optimal Control Systems
Zehui Lu, Wanxin Jin, Shaoshuai Mou, Brian D. O. Anderson
IEEE Conference on Decision and Control (CDC), 2022
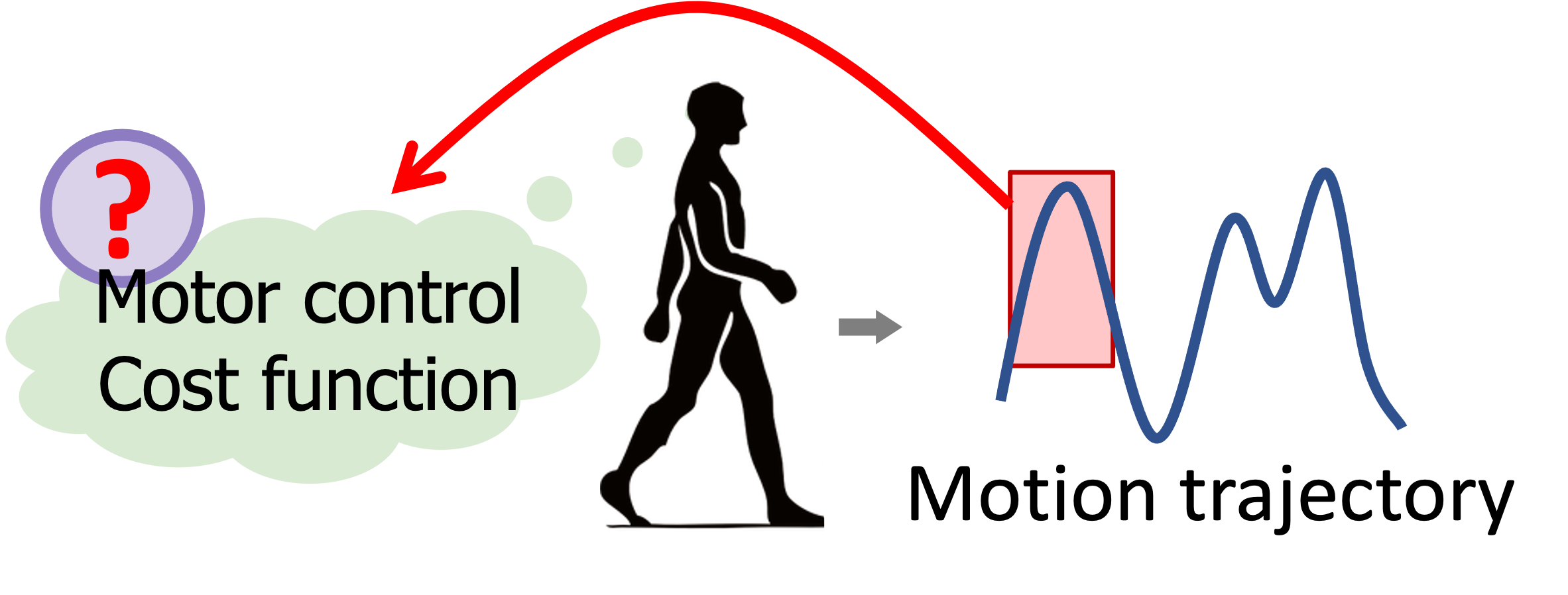
Inverse Optimal Control from Incomplete Trajectory Observations
Wanxin Jin, Dana Kulic, Shaoshuai Mou, and Sandra Hirche
International Journal of Robotics Research (IJRR), 40:848–865, 2021
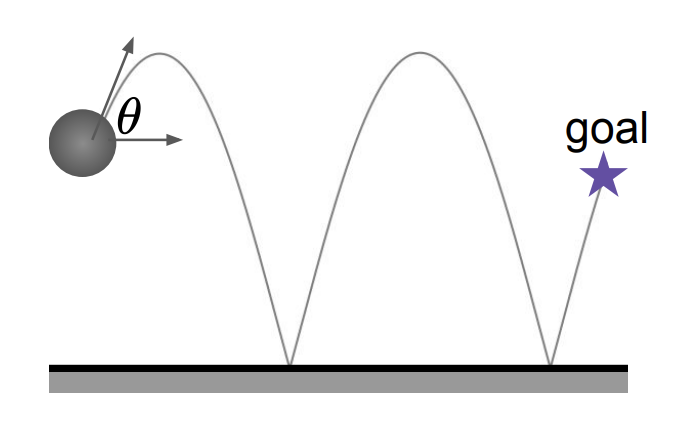
Safe Pontryagin Differentiable Programming
Wanxin Jin, Shaoshuai Mou, and George J. Pappas
Advances in Neural Information Processing Systems (NeurIPS), 2021
Distributed Inverse Optimal Control
Wanxin Jin and Shaoshuai Mou
Automatica, Volume 129, 2021
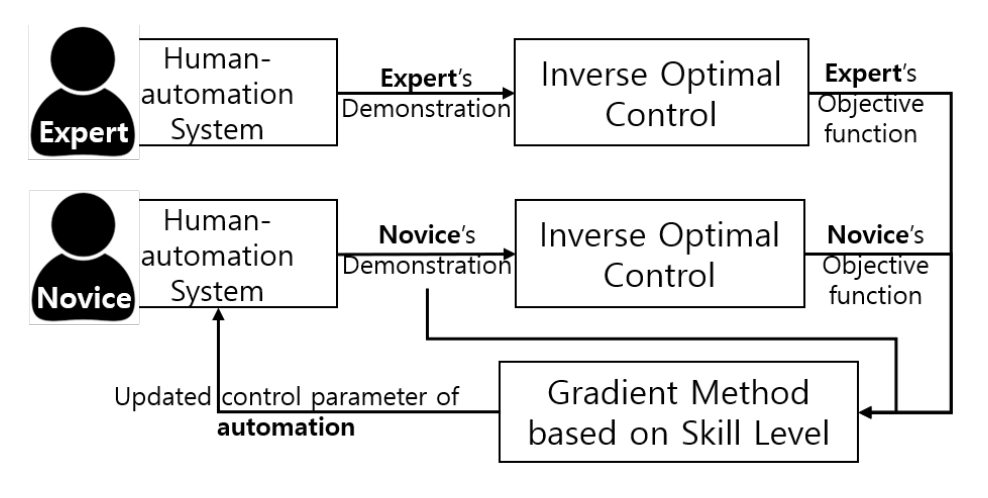
Human-Automation Interaction for Assisting Novices to Emulate Experts by Inferring Task Objective Functions
Sooyung Byeon, Wanxin Jin, Dawei Sun, and Inseok Hwang
AIAA/IEEE 40th Digital Avionics Systems Conference (DASC) , 2021. Best Student Paper Finalist
Pontryagin Differentiable Programming: An End-to-End Learning and Control Framework
Wanxin Jin, Zhaoran Wang, Zhuoran Yang, and Shaoshuai Mou
Advances in Neural Information Processing Systems (NeurIPS), 2020
Inverse Optimal Control for Multiphase cost functions
Wanxin Jin, Dana Kulic, Jonathan Lin, Shaoshuai Mou, and Sandra Hirche
IEEE Transactions on Robotics (T-RO), 35(6):1387–1398, 2019